基于變頻器平臺(tái)的起重機(jī)位置控制
發(fā)布時(shí)間:2012-03-29 作者:張俊杰
1引言
在實(shí)際應(yīng)用中,起重行業(yè)有很多起重機(jī)需要進(jìn)行位置控制����,例如全自動(dòng)垃圾吊,電鍍車間的工作起重機(jī)���;有些起重機(jī)對(duì)位置控制的精度要求還是比較高的,例如長(zhǎng)軌焊接基地的軌道吊���,核電實(shí)驗(yàn)室的起重機(jī)等�。
一想到位置控制,我們可能立刻想到的方案是使用伺服驅(qū)動(dòng)器����,當(dāng)然伺服系統(tǒng)具有高精度,高反應(yīng)速度等優(yōu)點(diǎn)���,但是對(duì)于起重行業(yè)來講����,伺服驅(qū)動(dòng)器的使用還是非常有限的����,主要由于:
起重機(jī)的驅(qū)動(dòng)功率通常比較大,伺服驅(qū)動(dòng)器和變頻器相比���,功率越大伺服驅(qū)動(dòng)器的價(jià)格劣勢(shì)越明顯���。
起重機(jī)的工作環(huán)境比較惡劣,通常會(huì)有灰塵�,振動(dòng),高熱以及腐蝕等環(huán)境,會(huì)大大影響伺服驅(qū)動(dòng)器的使用效果及壽命���。
起重機(jī)對(duì)位置控制的精度通常不會(huì)太高����,即便位置精度要求高���,但其要求的反應(yīng)速度一般比較低�。

圖1 起重行業(yè)現(xiàn)場(chǎng)
綜上原因����,我們完全可以在變頻控制器的基礎(chǔ)上開發(fā)位置控制系統(tǒng),使用變頻器為驅(qū)動(dòng)元件完成位置控制要求�,這樣既提高了系統(tǒng)的可靠性�,又大大降低了成本。
2系統(tǒng)控制要求
如圖2所示�,在起重機(jī)的平移機(jī)構(gòu)中,常見的驅(qū)動(dòng)方式為變頻器驅(qū)動(dòng)1到多個(gè)電機(jī)(典型值為1~6)���,由于是一拖多的方案����,所以電機(jī)控制控制方式為開環(huán)。在起重機(jī)的起升機(jī)構(gòu)中����,驅(qū)動(dòng)方式為變頻器一對(duì)一的驅(qū)動(dòng)單個(gè)電機(jī),所以電機(jī)控制控制方式為閉環(huán)矢量����。
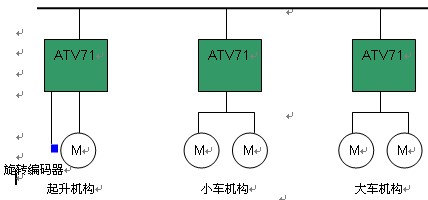
圖2 起重行業(yè)電機(jī)控制方式
平移機(jī)構(gòu)由于是開環(huán)驅(qū)動(dòng),控制精度不高����,而且平移機(jī)構(gòu)的輪子和軌道之間還存在滑動(dòng),所以通常平移機(jī)構(gòu)的位置精度要求誤差小于±20mm����,要求較高的場(chǎng)合需要小于±5mm。
起升機(jī)構(gòu)由于是開環(huán)驅(qū)動(dòng)���,控制精度高�,沒有機(jī)械滑動(dòng)���,所以通常起升機(jī)構(gòu)的位置精度要求誤差小于±5mm�,要求較高的場(chǎng)合需要小于±1mm����。
3系統(tǒng)解決方案
ATV71變頻器拖動(dòng)一個(gè)電機(jī)進(jìn)行FVC閉環(huán)控制���,其位置精度完全能夠勝任起重應(yīng)用場(chǎng)合,只是動(dòng)態(tài)響應(yīng)性沒有伺服系統(tǒng)高�,但起重機(jī)不需要那么快速的響應(yīng)速度。
3.1系統(tǒng)結(jié)構(gòu)
通常我們要進(jìn)行精確的位置控制����,需要ATV71變頻器和電機(jī)做閉環(huán)控制,這就需要在電機(jī)上安裝旋轉(zhuǎn)編碼器���,ATV71變頻器加裝編碼器卡和ATV-IMC卡�。位置控制的主要運(yùn)算和控制由ATV-IMC/CI卡來執(zhí)行����,系統(tǒng)結(jié)構(gòu)圖如圖3所示。
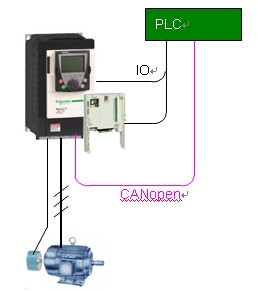
圖3 標(biāo)準(zhǔn)方案圖
位置控制的命令字以及位置給定等信息由PLC通過CANopen總線(也可以使用Modbus或以太網(wǎng)���,如果使用以太網(wǎng)需在變頻器上加裝以太網(wǎng)卡)發(fā)送至ATV-IMC/CI卡,ATV-IMC/CI卡經(jīng)過計(jì)算分析來驅(qū)動(dòng)變頻器執(zhí)行�。安裝在電機(jī)軸上的旋轉(zhuǎn)編碼器既作為變頻器和電機(jī)之間的閉環(huán)速度檢測(cè),也作為電機(jī)軸位置檢測(cè)的傳感器����。
圖3為標(biāo)準(zhǔn)方案圖�,位置檢測(cè)傳感器根據(jù)實(shí)際需要還可以直接和ATV-IMC/CI卡互聯(lián)�。位置檢測(cè)傳感器除了旋轉(zhuǎn)編碼器,還有磁尺����、格雷母線等。
3.2控制結(jié)構(gòu)和原理
首先���,在ATV-IMC/CI中位置控制的設(shè)計(jì)思路可以參考圖4的分析�。

圖4 時(shí)間-速度曲線
按照?qǐng)D4顯示�,橫坐標(biāo)為時(shí)間,縱坐標(biāo)為速度�,梯形的曲線為一段時(shí)間內(nèi)物體的速度曲線,即加速����,恒速和減速至0。這樣一個(gè)過程物體走過多遠(yuǎn)的距離呢���?
根據(jù)勻加速運(yùn)動(dòng)的公式:
在這里:V0=0���;
所以�,勻加速和勻減速階段的距離為:
就是加減速區(qū)域的三角形面積
同樣�,恒速階段走過的距離是長(zhǎng)方形的面積。
所以最終答案是:物體走過的距離是這個(gè)梯形的面積.
根據(jù)上述的分析�,我們?cè)谶M(jìn)行位置控制時(shí),首先知道的是需要運(yùn)行的距離���,及梯形的面積����,然后我們可以根據(jù)實(shí)際要求設(shè)定加減速時(shí)間和最高恒速速度�,這樣我們就可以計(jì)算出物體應(yīng)該的速度曲線,然后我們控制變頻器驅(qū)動(dòng)電機(jī)讓物體嚴(yán)格按照計(jì)算出的速度曲線去運(yùn)行���,就達(dá)到了位置控制的目的���。
在ATV-IMC中的位置控制軟件完全按照伺服系統(tǒng)的方式設(shè)計(jì)和編寫。
具體流程參考圖5���。

圖5 控制設(shè)計(jì)流程圖
首先我們通過"Profile Generator"功能塊計(jì)算出物體的運(yùn)行速度曲線���,然后控制變頻器按照速度曲線輸出�,將位置傳感器反饋的位置值和參考位置值進(jìn)行比較�,PID運(yùn)算���,然后將PID運(yùn)算的結(jié)果疊加到輸出速度上進(jìn)行微調(diào)以增加位置控制的精確度���。
3.3操作模式
此模塊的操作模式比較全:點(diǎn)動(dòng)模式、回原點(diǎn)操作�、給定位置停車、絕對(duì)位置控制�、相對(duì)位置控制、受控停車���、速度模式等����?��?梢赃m合大部分場(chǎng)合的應(yīng)用���。
4應(yīng)用案例
4.1長(zhǎng)軌焊接基地起重機(jī)群吊項(xiàng)目
此項(xiàng)目使用了如下=S=變頻器產(chǎn)品:
標(biāo)準(zhǔn)變頻器ATV71: 0.75-3kW、380V���、 64臺(tái)

圖6 長(zhǎng)軌焊接基地起重機(jī)群吊現(xiàn)場(chǎng)
?���。?)技術(shù)要求
本項(xiàng)目由32臺(tái)3噸單梁起重機(jī)(固定小吊)組成。聯(lián)合吊運(yùn)長(zhǎng)鋼軌����,一次吊運(yùn)1 根。群吊月臺(tái)長(zhǎng)度500 米����,每臺(tái)小吊的距離約為16 米。在月臺(tái)的中部或端部設(shè)有控制室
小車運(yùn)行速度為20米/分�,小車跨度27米,起升速度為8米/分�,最大起升高度5米。自動(dòng)運(yùn)行時(shí)���,吊鉤的誤差不能超過30mm���,32臺(tái)小車運(yùn)行時(shí)需要保持絕對(duì)同步。
?。?)解決方案
本方案采用ATV71變頻器開環(huán)控制小車電機(jī),小車位置反饋采用自由輪加旋轉(zhuǎn)編碼器的方案�,編碼器信號(hào)直接連接到CI卡上,PLC通過CANopen總線對(duì)小車進(jìn)行控制;圖7為單臺(tái)小車的傳動(dòng)方案。圖8為現(xiàn)場(chǎng)自由輪+編碼器���。

圖7 系統(tǒng)構(gòu)成 圖8現(xiàn)場(chǎng)自由輪+編碼器
我們?cè)诿颗_(tái)小車上都配置了上述系統(tǒng),所以當(dāng)32臺(tái)小車獲得運(yùn)行的位置值時(shí)����,他們計(jì)算出來的速度曲線是一樣的,這樣在正常情況下���,32臺(tái)小車的運(yùn)行應(yīng)該是同步的�,當(dāng)有小車出現(xiàn)故障或不同步時(shí)�,主PLC會(huì)干預(yù)處理,屏蔽掉該小車或調(diào)整速度����,極端情況下全線停車。系統(tǒng)控制方案如圖9所示�。

圖9 系統(tǒng)的控制方案圖
(3)控制效果
由于變頻器和小車電機(jī)之間為開環(huán)控制����,速度精度較差;所以小車的位控精度最終在15mm�,小于項(xiàng)目的技術(shù)要求范圍。
4.2全自動(dòng)垃圾起重機(jī)
此項(xiàng)目將使用如下=S=變頻器產(chǎn)品:
標(biāo)準(zhǔn)變頻器ATV71: 15-160kW、380V�、6臺(tái)

圖10 全自動(dòng)垃圾起重機(jī)現(xiàn)場(chǎng)
(1)技術(shù)要求
起重機(jī)采用觸摸屏和可編程序控制器(PLC)進(jìn)行半自動(dòng)操作和程序控制�。各機(jī)構(gòu)驅(qū)動(dòng)使用變頻器,根據(jù)工藝要求自動(dòng)調(diào)整輸出頻率和電壓����,實(shí)現(xiàn)起重機(jī)的手動(dòng)和半自動(dòng)運(yùn)行。手動(dòng)操作時(shí)在起重機(jī)控制室內(nèi)能夠控制起重機(jī)移料�、給料、堆料等所有動(dòng)作�;半自動(dòng)操作時(shí),在抓取完成后再根據(jù)所設(shè)定的投料地址���,起重機(jī)在程序控制下���,自動(dòng)運(yùn)行到投料位置,實(shí)現(xiàn)開啟抓斗����,將爐渣投入到料斗中,自動(dòng)完成投料過程�。
由于全自動(dòng)操作需要對(duì)料池進(jìn)行區(qū)域劃分,自動(dòng)定位���,自動(dòng)三維記憶等功能����,所以既要求平移機(jī)構(gòu)和起升機(jī)構(gòu)能夠有準(zhǔn)確的定位,由要求在給定位置到達(dá)后吊具不能有過大的晃動(dòng)�,影響工作效率,所以此機(jī)型為防搖控制和定位控制的結(jié)合應(yīng)用�。
?��。?)解決方案
我們使用ATV-IMC卡作為實(shí)際位控和防搖處理的控制元件�,在ATV-IMC卡中我們將防搖和位置控制的功能聯(lián)合使用�;及在高速段我們使用防搖功能來控制,位置控制為輔助功能����,在低速段,主要使用位置控制功能�。
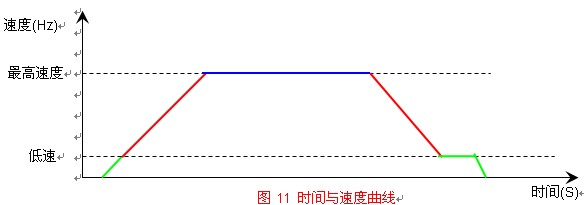
圖11 時(shí)間與速度曲線
如圖11所示,紅色的速度曲線為自動(dòng)防搖激活的區(qū)域�,綠色和藍(lán)色為自動(dòng)防搖不激活的區(qū)域。對(duì)于定位來講���,當(dāng)起重機(jī)運(yùn)行即將到達(dá)指定位置時(shí)PLC控制變頻器已最低速度運(yùn)行(盡量的低速)���。當(dāng)位置到達(dá)時(shí)停車���。
圖12為起重機(jī)的整體方案圖。
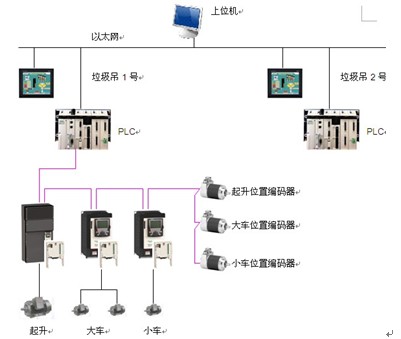
圖12 起重機(jī)的整體方案
所有機(jī)構(gòu)都安裝帶CANopen通訊的絕對(duì)值編碼器���,PLC首先獲取各編碼器的值����,然后傳輸給相應(yīng)的ATV-IMC卡�。ATV-IMC根據(jù)運(yùn)行模式進(jìn)行實(shí)際控制。
5結(jié)論
利用ATV-IMC/CI作為控制單元來進(jìn)行位置控制是變頻器功能的一個(gè)強(qiáng)大的延伸�,由于ATV-IMC或CI可以直接安裝于ATV71變頻器上,所以這套系統(tǒng)具有不占用安裝空間����,控制精度高,環(huán)境適應(yīng)能力強(qiáng)等優(yōu)點(diǎn)�,能夠在起重行業(yè)得到廣泛的應(yīng)用。